1. 焊接機器人總體方案
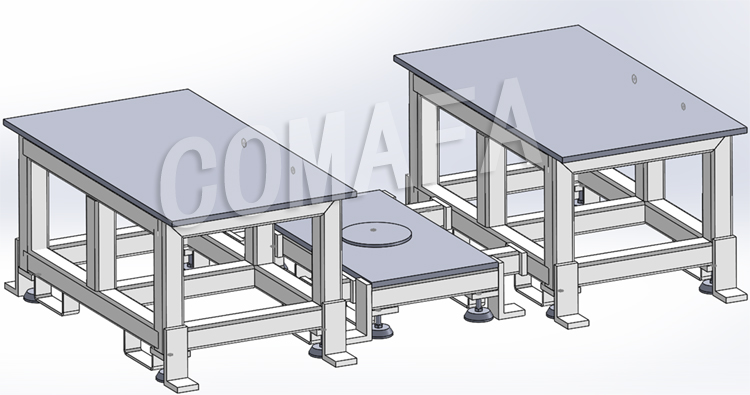
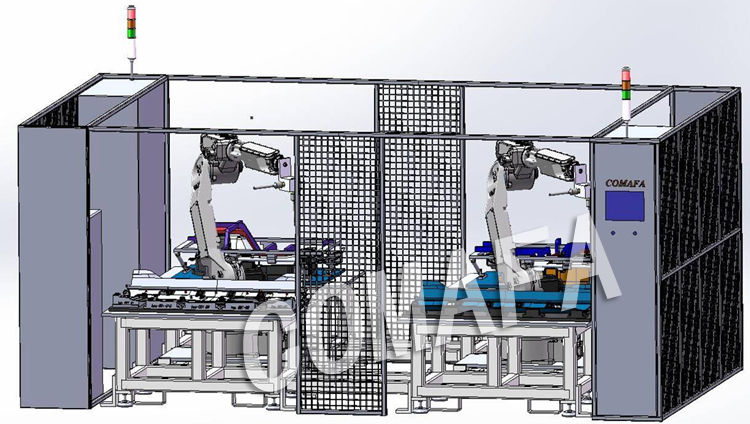
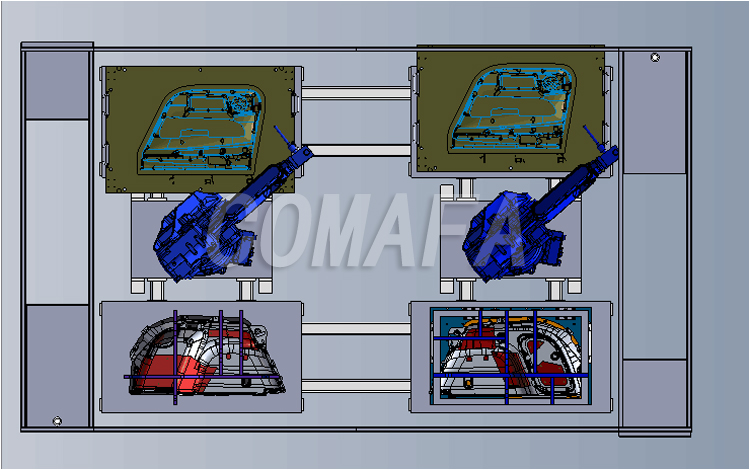
根據汽車塑料組件的尺寸、結構特點以及焊接(鉚點、穿刺)的形式,焊接工件一般都在機器人臂展范圍內。為降低成本和提高效率,在進行焊接機器人整體方案設計時,決定不采用翻轉工裝等機器人周邊設備,而采用固定平臺方式實現塑料工件的焊接,同時為提高焊接效率,焊接機器人系統方案采取一機多工位的模式,H型布置方式,如下圖所示,即機器人本體固定在兩自制焊接工作定位平臺之間,工作時一工位焊接機器人對人一側工件進行自動焊接,另一工位可以裝卸工件,交替進行作業,保證機器人連續不停工作。
2. 機器人本體選用
建議選擇機器人“四大家族”品牌機器人,保證焊接機器人長期穩定工作,機器人工作范圍內由圍護欄保護,保證操作工人的安全性。
3. 焊接工藝的確定
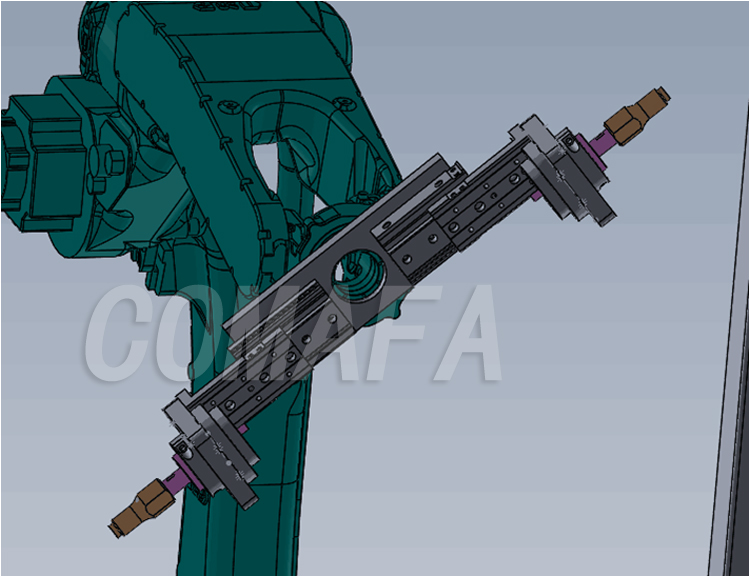
焊接工藝采用超聲波焊接,殼實現汽車塑料件的點焊以及隔音棉穿刺焊,由超聲波焊接組件帶動定制的焊頭完成焊接,非常利于焊接過程中的機械化和自動化。根據產品的不同焊接性狀,一臺機器人可以攜帶2套焊接組件,實用性更強。
4. 焊接參數確定?
汽車塑料件的焊接點位比較多,需要在盡量短的時間完成焊接,因此對焊接節拍有要求,超聲波焊接的參數一般控制在2-3s,機器人的運動軌跡時間在2s,因此,單點焊接節拍為4s左右,不同的產品可以根據實際情況來調節,所有的參數調節均可設置。
超聲波焊接機器人主要由以下部件組成:設備外框、支撐工裝、移行裝置(帶升降功能)、焊接設備(包括超聲波發生器等)、電控箱(包括操作顯示屏)、焊接機器人、安全光柵等。
超聲波焊接機器人工作站的設計方案可來電詳詢我司,我們會出具合適的焊接方案。
